免费试用
所有产品
万兴图示
基于模板的一站式办公绘图利器
万兴脑图MindMaster
基于云的多平台思维导图软件
万兴画板
基于白板的工作流搭建工具
万兴项管
基于甘特图的项目管理工具
新品上市
万兴图示V14
AI全面升级>>
万兴脑图V12
任务看板,AIPPT,
布局丰富>>
万兴画板V1.0
全新白板产品>>
所有产品
万兴图示
基于模板的一站式办公绘图利器
万兴脑图
基于云的多平台思维导图软件
万兴画板
基于白板的工作流搭建工具
万兴项管
基于甘特图的项目管理工具
万兴AI
万兴图示AI
万兴脑图AI
万兴AI
万兴图示AI
万兴脑图AI
政企服务
企业采购
政企套餐
国防版采购
客户案例
向团队介绍
政企服务
企业采购
政企套餐
国防版采购
客户案例
向团队介绍
社区资源
万兴图示模板中心
思维导图知识社区
万兴图示学堂
万兴脑图学堂
社区资源
万兴图示模板中心
思维导图知识社区
万兴图示学堂
万兴脑图学堂
帮助中心
帮助中心
文章教程
帮助中心
帮助中心
文章教程
免费下载
优惠
免费下载
优惠
登录
模板社区
机械臂抓取
立即使用
2.0k
156
28
1
举报
发布时间:2022年02月19日
机械臂抓取
机械臂抓取需要确定每段机械臂的位姿,机械臂需要视觉伺服系统,来确定物体的位置。
发布时间:2022年02月19日
流程图
机械臂
发表评论
打开APP查看高清大图
机械臂抓取
下载eddx文件
下载客户端
立即使用
社区模板帮助中心,
点此进入>>
EDQVPIwp
关注
他的近期作品
查看更多>>
相似推荐
立即使用
进口陆运转关业务流程图
7.4k
495
48
亿图图示
会员免费
立即使用
报价管理基本流程图
7.2k
336
63
亿图图示
会员免费
立即使用
基本流程电子商务流程图
4.5k
94
45
亿图图示
会员免费
立即使用
废水处理基本流程图
3.9k
178
23
亿图图示
会员免费
立即使用
检查委员会基本工作流程图
3.1k
147
13
亿图图示
会员免费
立即使用
户籍管理基本流程图
3.7k
60
16
亿图图示
会员免费
立即使用
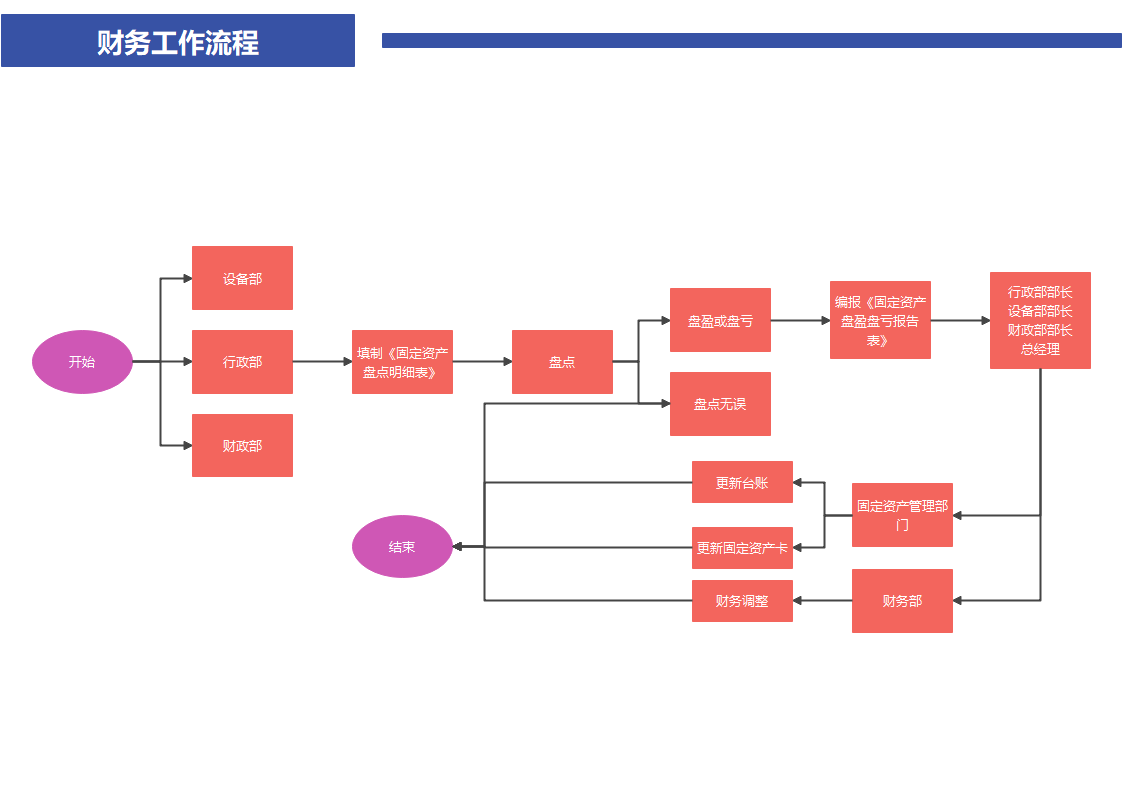
财务工作流程图
4.0k
65
16
亿图图示
会员免费
立即使用
交易基本流程图
3.5k
37
8
亿图图示
会员免费